InfoCon: Concept Discovery with Generative and Discriminative Informativeness
Published in ICLR, 2024
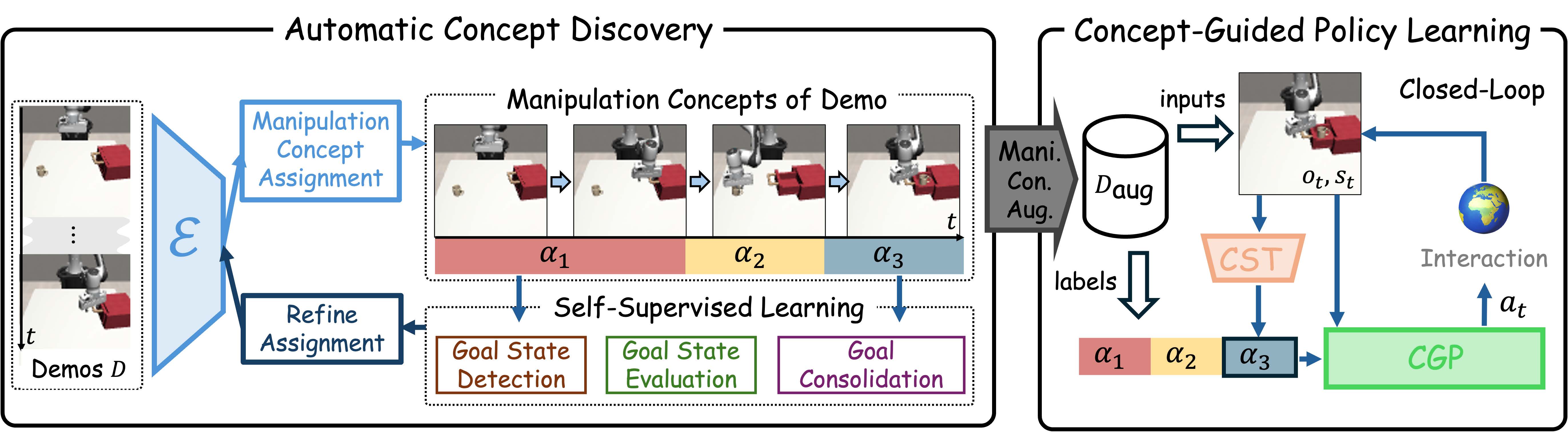
InfoCon is a self-supervised method for discovering manipulation concepts from unlabeled robot demonstration trajectories.
Recommended citation: Liu, Ruizhe, Qian Luo, and Yanchao Yang. "InfoCon: Concept Discovery with Generative and Discriminative Informativeness." The Twelfth International Conference on Learning Representations. https://arxiv.org/abs/2404.10606