HiMaCon: Discovering Hierarchical Manipulation Concepts from Unlabeled Multi-Modal Data
Published in NeurIPS, 2025
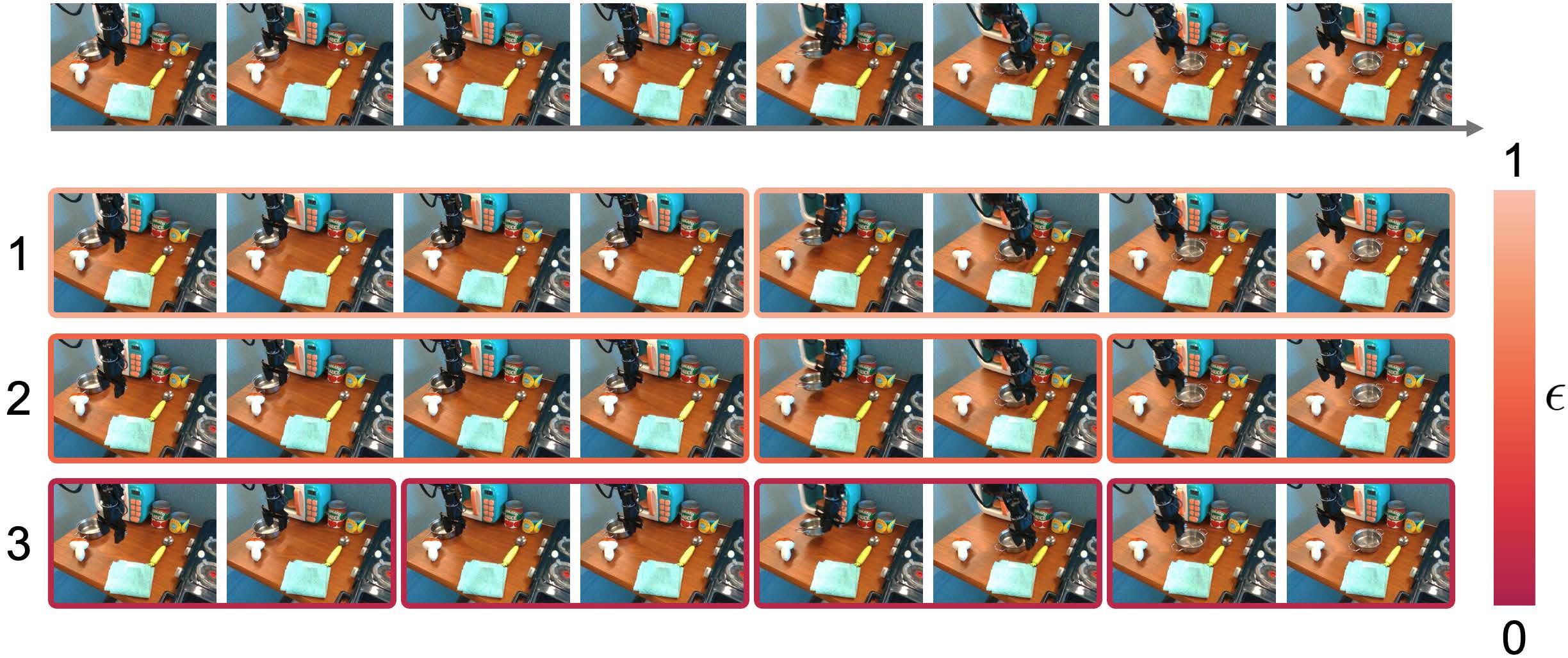
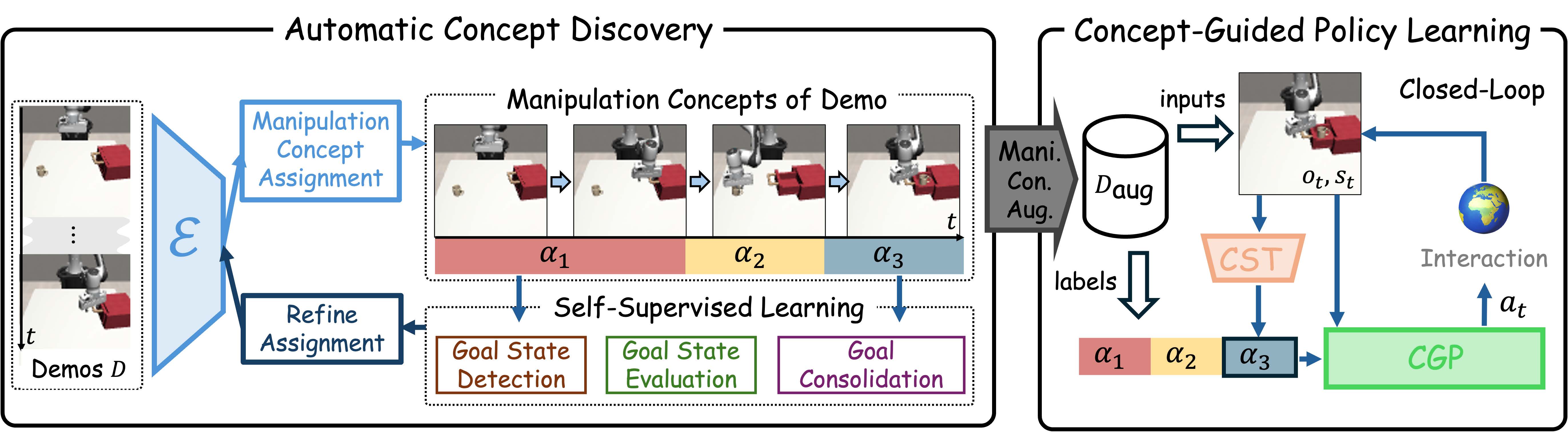
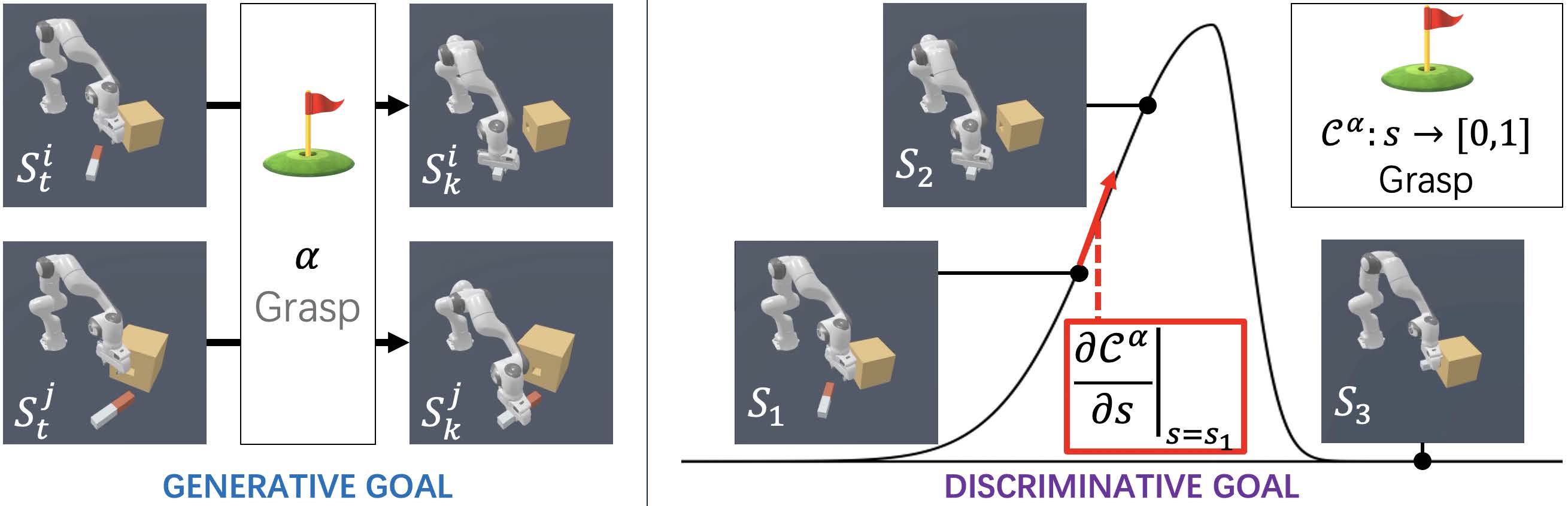
HiMaCon is a self-supervised framework that learns hierarchical “manipulation concepts” from unlabeled multi-modal robot demonstrations without human annotation.
Recommended citation: Liu, Ruizhe, et al. "$\textit {HiMaCon:} $ Discovering Hierarchical Manipulation Concepts from Unlabeled Multi-Modal Data." The Thirty-ninth Annual Conference on Neural Information Processing Systems. https://arxiv.org/pdf/2510.11321