
Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages
Posts
portfolio
publications
InfoCon: Concept Discovery with Generative and Discriminative Informativeness
Published in ICLR, 2024
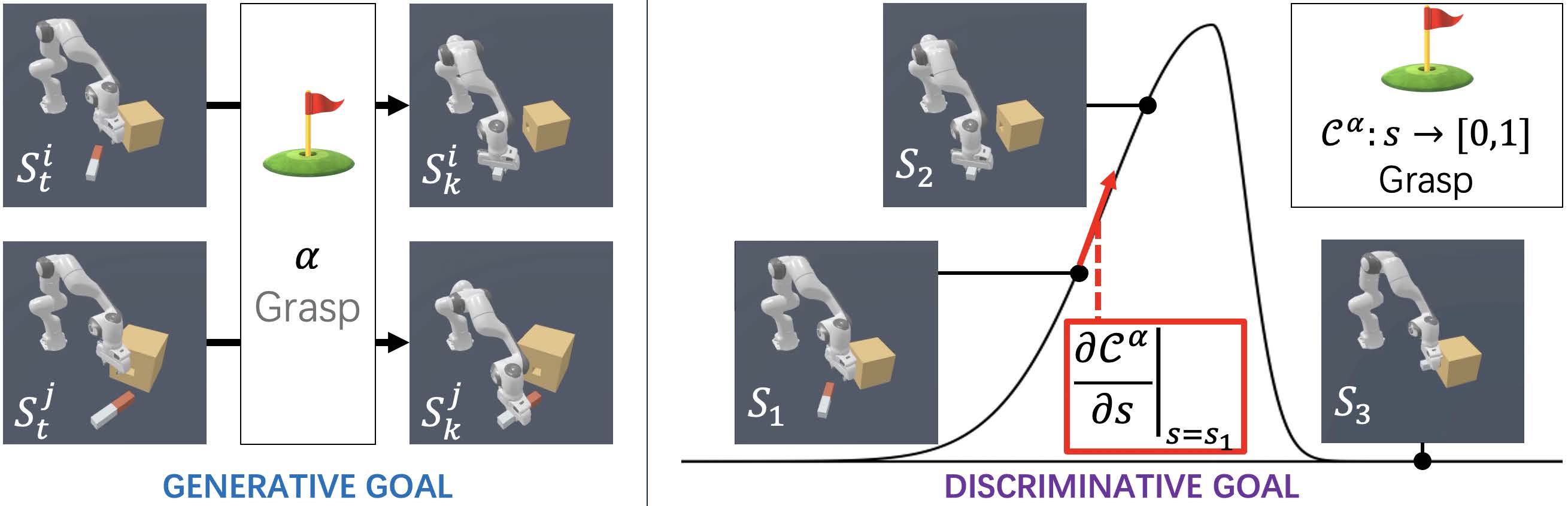
InfoCon is a self-supervised method for discovering manipulation concepts from unlabeled robot demonstration trajectories.
Recommended citation: Liu, Ruizhe, Qian Luo, and Yanchao Yang. "InfoCon: Concept Discovery with Generative and Discriminative Informativeness." The Twelfth International Conference on Learning Representations. https://arxiv.org/abs/2404.10606
AutoCGP: Closed-Loop Concept-Guided Policies from Unlabeled Demonstrations
Published in ICLR, 2025
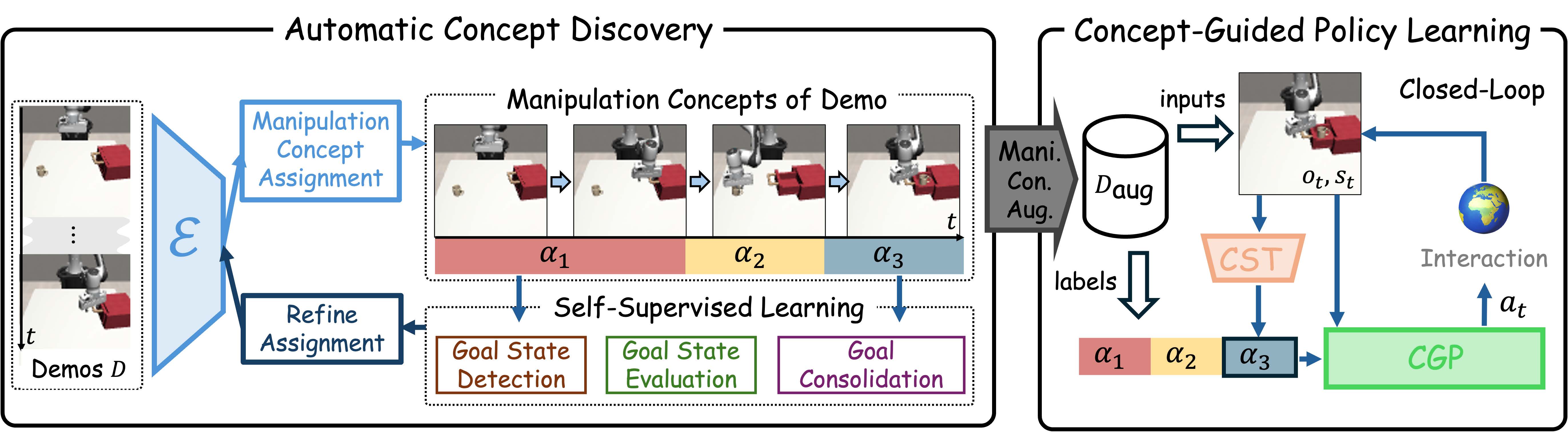
AutoCGP is a framework for training robots to perform complex manipulation tasks by automatically discovering and using “manipulation concepts” (motor skills like grasping, pushing, etc.) without human annotations.
Recommended citation: Zhou, Pei, et al. "AutoCGP: Closed-Loop Concept-Guided Policies from Unlabeled Demonstrations." The Thirteenth International Conference on Learning Representations. https://openreview.net/pdf?id=9ehJCZz4aM
HiMaCon: Discovering Hierarchical Manipulation Concepts from Unlabeled Multi-Modal Data
Published in NeurIPS, 2025
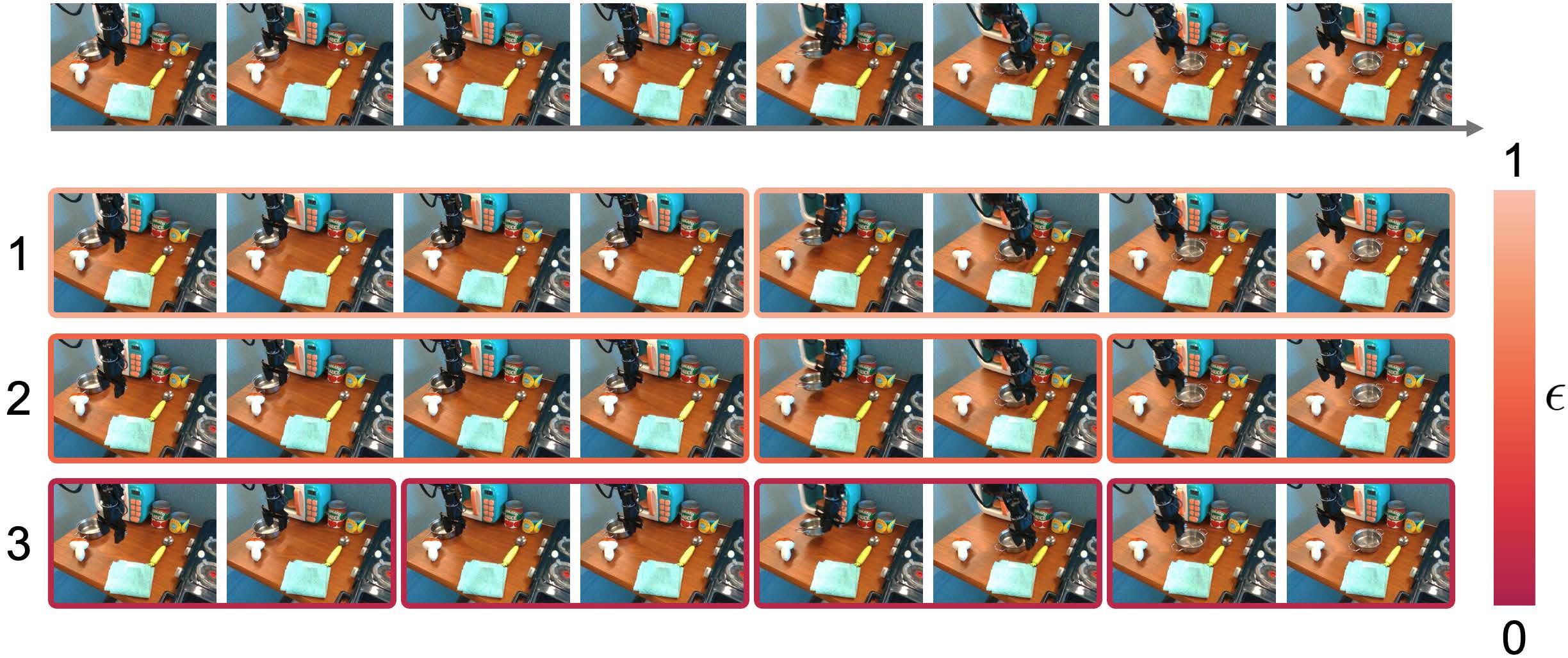
HiMaCon is a self-supervised framework that learns hierarchical “manipulation concepts” from unlabeled multi-modal robot demonstrations without human annotation.
Recommended citation: Liu, Ruizhe, et al. "$\textit {HiMaCon:} $ Discovering Hierarchical Manipulation Concepts from Unlabeled Multi-Modal Data." The Thirty-ninth Annual Conference on Neural Information Processing Systems. https://arxiv.org/pdf/2510.11321
talks
teaching
Teaching Assistant of HKU CCAI9025: AI-driven Robotics for Humankind
Undergraduate course, HKU, IDS, 2025